
maxon motor anime une main humanoïde robotisée
Les avancées les plus récentes en matière de mains robotisées imitant celle de l'homme sont considérables et des préhenseurs ultra-sensibles équipés de doigts et d'un pouce tels qu'on les imaginait il y a quelques années deviennent aujourd'hui réalité. Bientôt, des robots équipés de mains à cinq doigts feront partie du quotidien de nos entreprises. Les préhenseurs simples mais robustes à deux ou trois doigts utilisés jusqu'ici seront remplacés par de véritables mains à cinq doigts au fonctionnement complexe et capables d'effectuer les tâches les plus filigranes. Les énormes progrès de la microélectronique et de la micromécanique nous permettent de fabriquer des mains à plusieurs doigts pilotables individuellement et dont les articulations imitent celles de la main humaine. La mécanique et l'électronique de commande complexes nécessaires peuvent même être réalisées à partir de composants classiques disponibles dans le commerce.
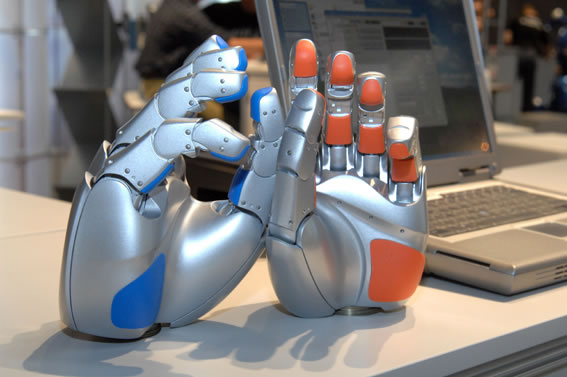
La main humaine est sans aucun doute l'un des outils les plus universels et les plus complexes existant dans la nature. Le secteur de la recherche se penche sur les propriétés et les avantages d'une telle technologie depuis de longues années déjà. Les résultats de ces travaux sont désormais utilisés et mis en œuvre dans les nouvelles générations de mains robotisées. Le centre aérospatial allemand (Deutsche Zentrum für Luft- und Raumfahrt - DLR), en collaboration avec le Harbin Institute of Technologie (HIT), a développé un nouveau type de main robotisée. La combinaison d'une technique d'entraînement miniaturisée de haute précision et d'un système de bus extrêmement performant ajoute une dimension entièrement nouvelle à ces mains de préhension humanoïdes. La nouvelle main DLR-HIT II comporte cinq doigts, chacun disposant de quatre articulations et de trois degrés de liberté. De plus, elle est plus petite et plus légère que la version précédente, la main DLR-HIT I. Quatre doigts servent à saisir des pièces coniques, le pouce faisant office de «butée» (il est en opposition). Pour pouvoir utiliser la main dans toutes les dimensions, la diversité mécanique de la manipulation doit être pilotée et surveillée avec une extrême précision. Cela signifie que les canaux de transmission des informations doivent être très performants.
Commande via bus à grande vitesse
Les moteurs de la main DLR-HIT II sont directement installés dans les doigts. Il est donc primordial de veiller à ce que les données de position et de service soient correctement transmises à l'ordinateur de commande. Ce n'est que dans ces conditions que chaque entraînement miniature peut développer tous ces atouts. Pour cette raison, chaque articulation a été équipée d'un capteur d'angle sans contact (développé en interne) et d'un capteur de couple. En raison du type d'application, ces deux capteurs doivent présenter une résolution extrêmement élevée. Un bus à grande vitesse transmet le flux de données inhérentes au fonctionnement. Un message en retour rapide permettant de comparer la valeur de consigne et la valeur réelle est déterminant pour le fonctionnement de la commande, en particulier dans les applications filigranes et de haute précision. C'est pourquoi la vitesse de transmission et la quantité des données revêtent un rôle crucial. Spécialement développé pour cette application, le bus à grande vitesse de 25 Mbps à temps réel est basé sur la technique FGPA (Field Programmable Gate Array). Seuls trois câbles sont nécessaires pour assurer la liaison sérielle entre la main et l'ordinateur de commande. La commande proprement dite, un processeur de signal sur carte enfichable PCI, est intégrée dans un PC disponible dans le commerce. Une interface conviviale permet de piloter la main à partir du PC. Toutes les données des capteurs s'affichent alors à l'écran. La représentation des données, la commande et la connexion entre la main et l'ordinateur ont été conçues dès le début pour permettre une utilisation pratique dans les milieux industriels.
Entraînement via moteurs maxon flat
Chaque doigt est équipé de plusieurs entraînements pilotables individuellement. Dans ce cas précis, une main comporte 15 moteurs à courant continu sans balais, avec des capteurs à effet Hall. Les entraînements EC 20 flat de maxon répondent à plusieurs critères décisifs. Ce sont des produits peu onéreux, disponibles dans le commerce et aux performances élevées, et ceci pour un encombrement minimum. Les moteurs, capteurs à effet Hall compris, forment une unité longue de 10, 4 mm seulement, pour un diamètre de 21,2 mm. Poids d'un moteur: 15 g. Les moteurs sont fixés aux réducteurs Harmonicdrive de série HDUC 05 et de diamètre identique et forment une unité complète. Les moteurs 3 W sont disponibles en modèle 12 ou 24 V et fournissent un couple maximum de 8,04 mNm. Un excellent comportement dynamique et des roulements à billes précontraints assurent une réactivité extrêmement précise aux commandes émises, même lorsqu'un changement du sens de rotation est requis. Les capteurs TOR à effet Hall signalisent toujours la position réelle à la commande avec la plus grande précision. Au ralenti, les moteurs tournent à 9300 tr/min.
La technique d'entraînement compacte à message en retour et la vitesse élevée de transmission des données par le biais d'un bus rendent le pilotage de la nouvelle main DLR-HIT II extrêmement précis et délicat. La micromécanique et la microélectronique se complètent à la perfection. De nos jours, il est possible de construire des produits à partir de composants standard et d'un concept solide, ce qui était impensable il y a peu, même avec des éléments développés sur mesure.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}