
Un robot delta au format de poche
La diversité des tâches de micromontage à réaliser au jour d'aujourd'hui représente pour les technologies d'entraînement un défi de plus en plus important. Alors que la taille des microcomposants et des microsystèmes ne cesse de diminuer, le développement de systèmes de production au niveau macroscopique est souvent négligé. Une société de Suisse Occidentale a révolutionné ce marché avec une gamme complète de produits, dans lesquels des moteurs puissants de maxon assurent des déplacements dynamiques et d'une extrême précision.
La société Asyril s'est spécialisée dans le développement et l'intégration de systèmes mécatroniques qui permettent la manipulation automatique rapide et souple de petits composants utilisés en microbiologie, en nanotechnologie et en biotechnologie. L'entreprise a été fondée en 2007, sur la base du savoir-faire technologique du CSEM et du CPA Group, par le spécialiste en microrobotique, le Dr. Alain Codourey. L'enjeu étant de déterminer s'il était possible de construire un minirobot de taille 100 x 100 x 100 mm, et si oui, de déterminer le type de système cinématique devant idéalement équiper un tel robot. Il y a 10 ans déjà, des chercheurs du Centre Suisse d'Electronique et de Microtechnique (CSEM) avaient constaté qu'un gouffre toujours plus profond s'ouvrait entre les microcomposants, toujours plus petits, et les systèmes de production, aux dimensions inchangées. Alors qu'il est relativement simple de miniaturiser les structures mécaniques d'un robot, une telle démarche est très limitée en ce qui concerne les entraînements: «Dans les systèmes conventionnels, les moteurs demeurent très gros par rapport au dispositif mécanique. L'installation cinématique conventionnelle d'un robot articulé, par exemple, s'avère inadaptée car les articulations contiennent encore des moteurs de dimensions importantes», explique de Dr. Alain Codourey.
Cette contradiction ne cessant de s'aggraver, une équipe de chercheurs s'est organisée au CESM, autour du spécialiste en microrobotique qu'est Codourey, ainsi qu'à la Haute école spécialisée de Biel, dans le but de mettre au point des systèmes bien mieux adaptés au maniement des microcomposants techniques.
«En fin de compte, nous sommes arrivés à la conclusion que les structures cinématiques parallèles offrent les meilleures possibilités d'atteindre les objectifs que nous nous sommes fixés», a déclaré Codourey.
L'idée d'un système d'axes cinématiques parallèles a été perfectionnée tout d'abord. La conception filigrane et légère est destinée à réduire le plus possible le moment d'inertie de masse de tous les composants. La configuration delta choisie présente l'énorme avantage que les moteurs maxon assurent certes les mouvements du mécanisme cinématique, mais sans qu'ils se déplacent. Ils sont simplement fixés au cadre protecteur et transmettent le mouvement directement à la structure concernée. Ce principe de construction a été appliqué dans toute la gamme des robots Delta: les modèles «Desktop Delta», «Power Delta» et «Pocket Delta» sont tous construits selon ce même principe.
Technique d'entraînement allégée pour le micromontage
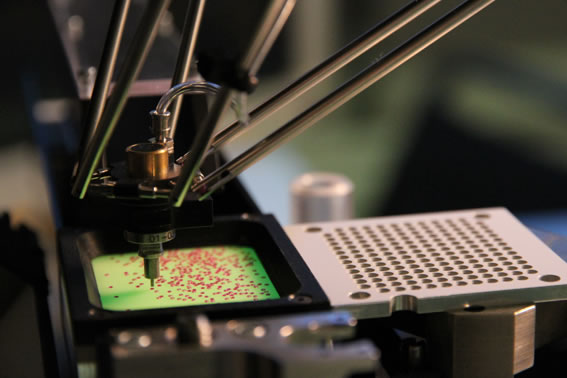
La cure d'amaigrissement n'a pas touché uniquement la structure mécanique, les entraînements ont eux aussi été pris en compte. Le Pocket Delta est équipé de micromoteurs de maxon, à encombrement réduit, qui remplacent les anciens moteurs surdimensionnés, de puissance élevée et aux émissions de chaleur conséquentes. Le mécanisme parallèle du robot est entraîné par trois EC-i 40 installés sur une plaque positionnée au-dessus du robot lui-même. La masse déplacée est ainsi très réduite, ce qui rend le robot très dynamique. Un cycle Pick-and-Place du robot Pocket Delta dure 0,33 s, ce qui représente trois cycles par seconde. La combinaison de cette vitesse et de la rigidité élevée de la structure cinématique confère au robot une répétabilité de précision inférieure à 3 microns. Les moteurs à courant continu DC sans balais présentent un diamètre de 40 mm seulement et atteignent une puissance de 50 W. Pour que le robot delta soit rapide out en étant précis, mesurer la position angulaire du moteur avec une précision extrême est absolument prioritaire. Ainsi, les micromoteurs sont reliés directement avec des codeurs haute résolution, chargés de la saisie de la position. Chaque moteur dispose en outre d'un frein d'immobilisation fabriqué par Asyril. Il s'agit en fait de petites broches qui retiennent les axes des moteurs. Elles sont rétractées pendant le fonctionnement du moteur, sous l'action d'électroaimants, afin de desserrer le frein. La commande du robot est entièrement intégrée dans le robot lui-même et la communication est réalisée via une interface Ethernet. Grâce à ses propriétés, le robot est parfaitement adapté au déplacement ou à l'assemblage rapide de petits composants. Dans sa catégorie, il fait partie des plus rapides et des plus précis. Cette construction présente également un autre avantage: un réducteur n'est pas indispensable avec le robot Pocket Delta.
Le robot Pocket Delta est utilisé dans différentes branches d'activité industrielle. Le tri, la sélection et le traitement de microcomposants dans l'horlogerie sont le domaine d'utilisation de prédilection de ce robot. Ainsi, cette solution permettant de monter presque toutes les pièces dans un mécanisme d'horloge mécanique, que ce soient par exemple des vis, des rivets, des goupilles ou des roues dentées. Mais le Pocket Delta est également utilisé dans des applications de génie médical, dans l'industrie électronique et des semi-conducteurs. Les pièces à déplacer sont de taille comprise entre 0,5 et 15 millimètres.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}