
Projet Pegasus: Comme un cheval au galop.
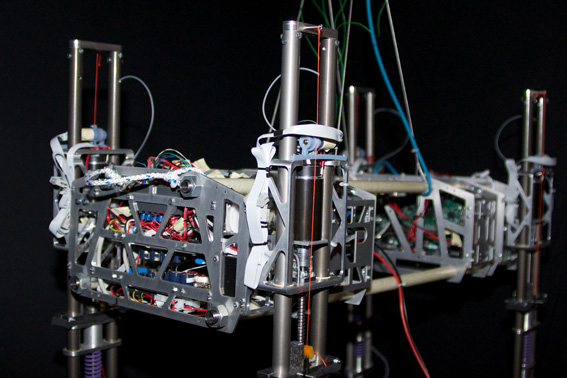
Le robot Pegasus, créé par des étudiants de l'ETH Zürich dans le cadre d'un projet de recherche, n'est pas équipé d'ailes comme le cheval ailé de la mythologie grecque. Mais ce robot autonome dispose de fortes jambes qui sont en mesure, grâce aux moteurs maxon, de galoper presque comme celles d'un cheval.
Le robot autonome Pegasus a été conçu dans le cadre d'un projet de recherche mené à l'ETH Zürich; grâce à ses jambes télescopiques, il est en mesure de parcourir des distances importantes. Les jambes sont conçues pour un trot dynamique et fournissent, grâce à une technique d'entraînement dernier cri, des performances de pointe avec une consommation d'énergie réduite. Pegasus est de conception modulaire et peut être utilisé dans diverses applications. Chaque module est composé de deux jambes robotisées. Le robot qui se déplace peut donc être bipède, quadrupède, ou même avoir six jambes. Ce sont trois modules en tout qui ont été construits dans le cadre du projet.
Dix étudiants en génie mécanique de l'ETH Zürich et de la TU Delft (Pays-Bas) – six étudiants de la ETH Zürich et quatre étudiants de la TU Delft – ont développé ce robot autonome en étroite collaboration, lors des deux derniers semestres de leur bachelor. Leur objectif: ce robot devait parcourir une distance de 10 kilomètres en moins de 10’000 secondes (2 h 47 min., env. 3,6 km/h) avec une seule charge d'accumulateurs. Par conséquent, la construction du robot devait être particulièrement économe en énergie et le robot devait permettre, par exemple, aux ressorts intégrés dans les jambes d'emmagasiner de l'énergie.Le projet a été lancé fin 2010. Les premiers essais de sautillement eurent lieu en avril 2011 – l'élasticité a été testée d'abord de manière complète sur une seule jambe. Dans chaque jambe, un moteur maxon DC RE40 entraîne la broche chargée de l'extension et de la compression de la jambe.
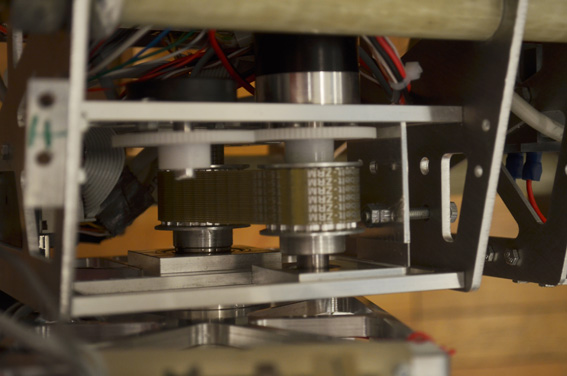
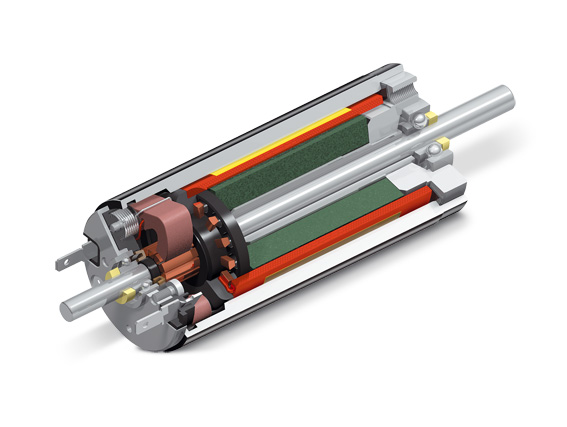
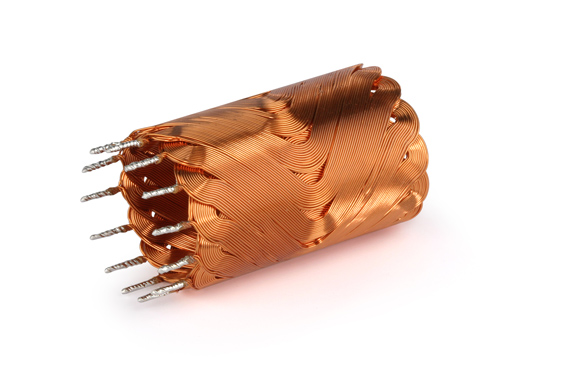
Un moteur EC 4pole , pour sa part, pilote le degré de liberté de rotation du module de hanche (pièce de liaison entre deux modules de jambe). Ce moteur d'une puissance de 200 W permet également la rotation de la jambe complète. Grâce à la technique spéciale de bobinage et aux aimants à 4 pôles, les entraînements maxon EC-4pole sont imbattables en matière de performances par unité de volume et de poids. Les moteurs présentent un rendement élevé dépassant 90 pourcent, une excellente dynamique de régulation et aucun couple de détente. Le boîtier métallique assure une bonne dissipation de la chaleur ainsi qu'une grande stabilité mécanique. Ces entraînements demeurent inégalés en ce qui concerne la longévité.
La commande
Deux commandes de position distinctes ont été prévues pour le pilotage du robot Pegasus. D'une part, une commande EPOS 24/2 qui assure la commande d'interfaces supplémentaires de capteurs. Comme tous les autres produits EPOS de maxon, cette commande de positionnement a été développée spécialement pour assurer le pilotage et la commande dans des réseaux CANopen. Cette commande a été équipée d'excellentes fonctionnalités de contrôle du mouvement. Le mode «Interpolated Position» (PVT) permet à la commande de positionnement de parcourir de manière synchrone une trajectoire prédéfinie par des points de repère. D'autre part, la commande EPOS2 70/10 utilisée est particulièrement adaptée à des moteurs DC avec balais et codeur, ou alors à des moteurs EC sans balais à capteurs à effet Hall et codeurs de 80 à 700 W. Dans le système Pegasus, cette commande est chargée de la régulation du couple (Current Mode) des moteurs EC-4pole et de la régulation de la vitesse (CANopen Profile Velocity Mode) des moteurs RE utilisés. En mode Current Mode, il est possible de régler le couple à une valeur constante sur l'arbre du moteur. En mode «CANopen Profile Velocity Mode», par contre, l'axe du moteur se déplace selon la vitesse de consigne prescrite.
L'objectif d'origine du projet n'a pas été atteint car le calendrier de réalisation défini était trop court. Différentes pièces du robot n'étaient pas parfaitement adaptées les unes aux autres, pour ce qui était de leur fonctionnalité, explique Steve Heim, ancien étudiant participant au projet Pegasus.
Le projet se poursuit actuellement au laboratoire Autonomous Systems Lab (ASL) de la ETH Zürich. Depuis la fin de l'année dernière, des stagiaires de l'ASL travaillent au succès d'une mise en œuvre du projet. Pegasus a entre temps réussi ses premiers sauts stables en configuration à deux pattes. L'objectif consistant à parcourir une distance de 10 kilomètres en moins de 10’000 secondes et avec une seule charge d'accumulateur est à portée de main.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}