
Kenshiro: un robot costaud, avec 160 muscles
Après de longues années de recherche, l'Université de Tokyo a fabriqué un robot humanoïde commandé par des «tendons» et plus de 160 muscles artificiels. Ce robot mesurant seulement 158 centimètres effectue des mouvements calqués sur ceux du corps humain grâce à 100 moteurs maxon sans balais.
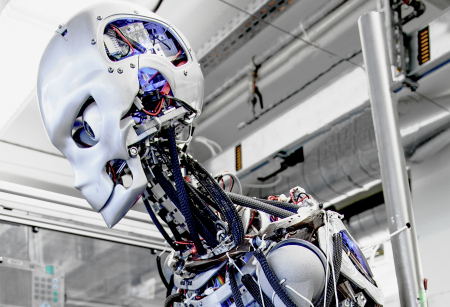
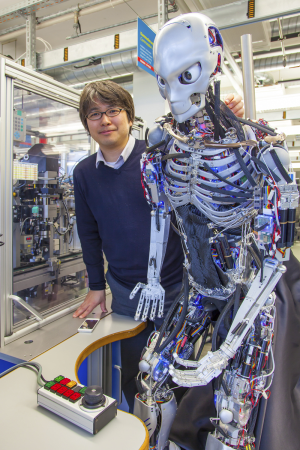
Piloté par une sorte de muscles, ce robot humanoïde développé par l'Université de Tokyo imite particulièrement bien les mouvements du corps humain. Il a été baptisé Kenshiro – nom d'un héros de manga bien connu des années 80 au Japon. Les scientifiques japonais se sont inspirés de l'anatomie humaine pour que le résultat soit un humain artificiel certes, mais à la physionomie la plus naturelle possible. «Notre objectif est de comprendre les mouvements du corps et la physionomie, puis de les reproduire le plus précisément possible dans Kenshiro», explique le Professeur Kei Okada. Le robot est calqué sur la physionomie d'un garçon japonais de 12 ans, mesurant 1,58 m et pesant 50 kilos.
Kenshiro a été pourvu de mécanismes imitant les principaux muscles du corps, qui calquent au mieux l'anatomie humaine : 50 muscles dans les jambes, 76 dans le torse, 12 dans l'épaule et 22 dans le cou. Il s'agit du plus grand nombre de muscles jamais intégré dans un robot humanoïde. En comparaison, l'anatomie humaine est encore bien plus complexe, avec ses 640 muscles. Les 160 mécanismes différents de Kenshiro, imitant des muscles commandés par des tendons, permettent de réaliser de nombreux mouvements anthropomimétiques, même si Kenshiro est encore loin de reproduire les mouvements humains dans toute leur complexité. Kenshiro bouge ainsi les bras, les jambes et le torse. Mais il doit encore apprendre à marcher correctement. Au fait, comment un robot peut-il apprendre à effectuer des mouvements anthropomimétiques ? Il suffit de lui montrer un mouvement, qu'il reproduira ensuite.
La méthode d'apprentissage est simple, elle utilise un logiciel intelligent Open Source et une interface mécanique. Mais l'apprentissage de la marche exige bien d'autres choses.
Les «os» de Kenshiro sont fabriqués en aluminium et reliés les uns aux autres par une sorte d'articulations. Le poids de 50 kilos représente le plus grand défi auquel les scientifiques de l'équipe dirigée par le professeur Masayuki Inaba ont été confrontés jusqu'ici. Car en effet, un modèle «adulte» de Kenshiro signifierait un poids approchant les 100 kilos, et par conséquent des contraintes plus importantes, des besoins énergétiques élevés et des mouvements plus lents.
93 moteurs pour 160 muscles
Les chercheurs du Jouhou System Kougaku Laboratory (JSK) de l'université de Tokyo ont choisi maxon comme fournisseur du système d'entraînement. Les 93 moteurs maxon EC (BLDC) assurent la contraction des 160 muscles de Kenshiro. La contraction de certains muscles, comme par exemple des muscles abdominaux et pectoraux, est assurée par un entraînement à moteur unique. Cette tâche est réalisée par des moteurs maxon sans balais EC 16 et EC 22. En effet, les servomoteurs à commutation électronique se caractérisent par d'excellentes données de couple, une dynamique exceptionnelle, une plage de vitesse extrêmement étendue ainsi qu'une longévité importante. La contraction des muscles, par contre, exige des moteurs BLDC puissants, les scientifiques ont donc fait appel à des moteurs maxon de 60 à 100 W de puis¬sance. Un autre critère de sélection significatif a été l'évolution de la température du moteur en fonc¬tionnement. Dans la mesure où il est impossible d'intégrer un système de refroidissement au robot, il est donc primordial, selon le Professeur Kei Okada, que les moteurs dégagent très peu de chaleur.
Le JSK a construit différents robots depuis 1980, allant de divers robots de service et robots industriels, au début, jusqu'aux robots humanoïdes de type Kenshiro. Tout comme ses prédécesseurs Kenta, Kotaro, Kojiro et Kenzoh, Kenshiro a été conçu pour imiter le corps humain le plus fidèlement possible. Ce qui implique aussi une apparence anthropomimétique. Les scientifiques japonais travaillent donc actuellement à concevoir une sorte de peau pour le robot. Dans un avenir proche, l'interaction de Kenshiro avec son environnement sera encore renforcée. Car l'objectif suivant est de permettre à Kenshiro de marcher longtemps et de manière stable.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}