
Inspection immergée sur douze roues
L'inspection des canalisations immergées de centrales nucléaires exige des qualités manuelles exceptionnelles d'agilité et de précision. Les véhicules robotisés doivent être améliorés en conséquence afin, par exemple, de pouvoir plonger jusqu'à des profondeurs de 20 mètres. Le nouveau manipulateur en eau de mer peut parcourir des canalisations immergées tout en les inspectant. L'entraînement dynamique du robot est assuré par des moteurs RE de maxon.
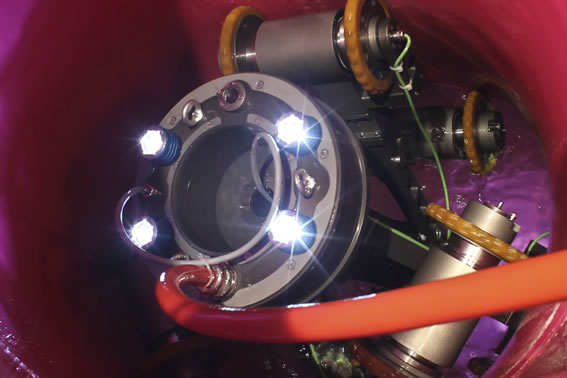
En robotique, les manipulateurs sont les appareils qui permettent une interaction physique avec l'environnement. Les robots sont spécialement équipés pour assurer cette interaction; ils disposent d'outils, de préhenseurs ou d'appareils de mesure adaptés. Le manipulateur en eau de mer, pour sa part, est équipé avant tout de caméras hautes performances qui servent à l'inspection des canalisations. L'entreprise Ibass, qui siège à Augsbourg, développe, fabrique et distribue des manipulateurs destinés au travail à l'intérieur des canalisations: le contrôle, le meulage, le soudage, le renflouage ou l'aspiration. Les manipulateurs sont composés d'un chariot de déplacement, du module de travail requis et d'une caméra. Ils fonctionnent à l'énergie électrique et pneumatique et traînent par conséquent les câbles et conduites nécessaires derrière eux. Ces véhicules robotisés sont avant tout destinés aux exploitants de centrales nucléaires et de raffineries, aux fabricants de tuyaux et aux monteurs de systèmes de canalisations: «Dans le cadre du montage, nous assurons par exemple que les soudures sont parfaites», explique Michael Strasser, Directeur d'Ibass.
Le manipulateur en eau de mer permet de procéder aux contrôles visuels nécessaires dans les canalisations de refroidissement des centrales nucléaires, qu'il est impossible de vider (d'où son nom). Ce type d'appareil est également utilisé pour procéder au revêtement intérieur de pipelines, car cette activité exige d'utiliser des modules sur roues absolument étanches. Le manipulateur en eau de mer élaboré par Ibass peut parcourir et inspecter des canalisations de diamètre compris entre 550 et 780 mm.
Cette plage de diamètres des canalisations dépend de la course axiale du vérin pneumatique et de l'extension du mécanisme à leviers croisés.
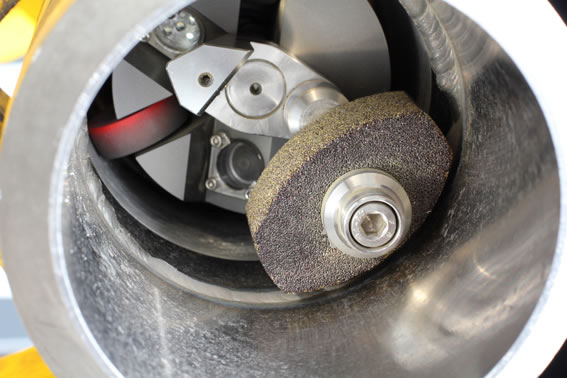
L'entraînement à ciseaux fonctionne avec douze roues en tout, c'est à dire deux roues par côté et moteur d'entraînement; grâce à leur force de pression variable, ces roues lui confèrent une assise stable même dans des canalisations à revêtement glissant. L'entraînement dispose de six moteurs RE puissants en tout, combinés avec un réducteur planétaire – un moteur par paire de roues. Les moteurs à courant continu se distinguent avant tout par un rendement supérieur à 90%, combiné avec une consommation d'énergie très faible et un couple très important, ce qui est une condition préalable majeure à certains domaines d'utilisation. Ils sont d'autre part équipés de bobinages sans fer et d'aimants Neodym, avec lesquels ils peuvent atteindre des performances exceptionnelles malgré un encombrement réduit. Leur robustesse et leur longévité ont été pour Ibass les arguments qui ont fait pencher la balance en leur faveur.
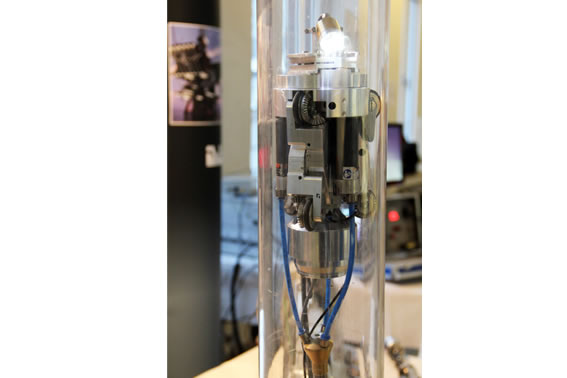
La robustesse des moteurs est elle aussi primordiale, car le manipulateur doit être particulièrement résistant sur son lieu d'utilisation – il peut ainsi supporter une pression allant jusqu'à 2 bars, ce qui signifie qu'il peut être immergé à une profondeur pouvant atteindre 20 mètres. Le robot présente une force de traction d'environ 250 kg (2,5 kN) et il peut pénétrer jusqu'à 200 mètres à l'intérieur de la canalisation. Les manipulateurs sont éclairés à l'avant et à l'arrière. L'avant dispose d'une caméra hautes performances à tête pivotante et inclinable équipée d'un zoom x10; l'arrière présente une caméra simple. Qu'il s'agisse de meulage, de contrôle, d'inspection ou de renflouage, le manipulateur en eau de mer peut prendre en charge tous les modules de travail Ibass et parcourir très facilement jusqu'à cinq coudes de tuyau (siehe Video). Les moteurs et les réducteurs de maxon ne sont pas seulement utilisés pour assurer l'entraînement du manipulateur en eau de mer, mais des moteurs RE sont aussi utilisés dans les modules de travail, par exemple pour assurer la rotation et le déplacement axial du module de pénération du colorant. Le contrôle de pénétration du colorant permet de contrôler la présence de fissures éventuelles sur la surface intérieure de tuyaux à l'aide d'une méthode particulière. Les manipulateurs pour intérieur de conduites sont des outils indispensables à l'industrie moderne et ils contribuent à améliorer la sécurité et la fiabilité des centrales nucléaires, par exemple, ou des parcs éoliens offshore.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}